






بخشی از پاورپوینت
--- پاورپوینت شامل تصاویر میباشد ----
اسلاید 1 :
نمایش عدم قطعیت
lتعریف خطا: اختلاف بین اندازه گیری سنسور و مقدار واقعی
lنمایش آماری: میخواهیم از لحاظ آماری مشخصات خطای یک سنسور را برای هر اندازه گیری پیدا کنیم.
lاگر اندازه گیری را بصورت یک مسئله تخمین بیان کنیم، هدف تخمین مقدار خطا از روی n مقدار اندازه گیری شده است.
E[X]=g(p1,p2,…,pn)
اسلاید 2 :
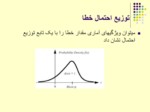
توزیع احتمال خطا
lمیتوان ویژگیهای آماری مقدار خطا را با یک تابع توزیع احتمال نشان داد
اسلاید 3 :
توزیع نرمال
lمعمولا وقتی که مدل بهتری برای نمایش خطا نداشته باشیم از توزیع نرمال استفاده میکنیم.
lاین توزیع خواص ریاضی بهتری نسبت به سایر روشها دارد.
اسلاید 4 :
استقلال متغیرهای تصادفی
lدر روبات متحرک فرض استقلال مقادیر اندازه گیری شده کاربرد فراوانی دارد.
lبرای مثال درروباتی که با دو لیزر چپ و راست فاصله ها را اندازه گیری میکند مقادیر اندازه گیری شده مستقل از هم خواهند بود.
lاین فرض برای دو متغیر تصادفی X1, X2بصورت زیر است:
E[X1 X2]= E[X1] E[X2]
Var([X1 +X2)=Var(X1 )+Var(X2 )
اسلاید 5 :
انتشار خطا
روبات متحرک مجبور است تا برای استخراج اطلاعات از محیط اندازه گیری های زیادی انجام نموده و داده های آنها را با هم ترکیب نماید.
اما سیگنالهای حاصل از سنسورها همواره همراه با عدم قطعیت است. معمولا مایل هستیم که بدانیم:
منبع عدم قطعیت کدامست
lچگونه میتوان عدم قطعیت را نمایش داد
نحوه انتشار عدم قطعیت یک مقدارچگونه است
عدم قطعیت حاصل از قرائت های سنسورهای مختلف کدامست
اسلاید 6 :
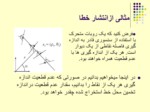
مثالی ازانتشار خطا
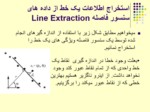
lفرض کنید که یک روبات متحرک با استفاده از سنسوری قادر به اندازه گیری فاصله نقاطی از یک دیوار است. هر یک از اندازه گیری ها با عدم قطعیت همراه خواهند بود.
lدر اینجا میخواهیم بدانیم در صورتی که عدم قطعیت اندازه گیری هر یک از نقاط را بدانیم، مقدار عدم قطعیت دراندازه تخمین محل خط استخراج شده چقدر خواهد بود.
اسلاید 7 :
سیستم انتشار خطا
lسیستم انتشار خطا یک سیستم دارای چندین ورودی و خروجی است.
lمیخواهیم از روی توزیع احتمال خطا برای سیگنال ورودی Xiتوزیع احتمال خطا برای سیگنال خروجی Yi را محاسبه نمائیم.
اسلاید 8 :
قانون انتشار خطا
lبرای مسایلی که انتشار خطا غیر خطی است میتوان نشان داد که ماتریس کوواریانس خروجی از قانون انتشار خطای زیر بدست میآید:
اسلاید 9 :
استخراج ویژگی
lیک روبات متحرک باید بتواند با اندازه گیری از طریق سنسورها و تعبیر اطلاعات موجود در آن رابطه خود با محیطش را بدست آورد.
lبرای اینکار نیازمند مدلی از محیط خواهیم بود که به کمک آن بتوانیم داده های سنسورها را تابیر کنیم.
اسلاید 10 :
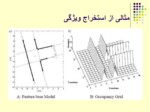
استخراج ویژگی
وقتی که سنسور اطلاعاتی را اندازه گیری میکند به طریق میتوان از این اطلاعات استفاده نمود:
تعیین رفتار روبات با استفاده از اطلاعات خام
استفاده از اطلاعات سنسورها برای بروز کردن یک مدل و تعیین رفتار روبات از بصورت تابعی از مدل
استخراج اطلاعات مفید از سنسورها و ایجاد یک درک سطح بالا از آن
