







بخشی از مقاله
الگوي ترافيك مشاهده شده در صفوف بلند آزاد راه ها
1- چكيده
آناليز تجربي ارائه شده در اين مقاله نشان مي دهد كه در نمونه هاي معين چگالي (و همچنين جريان و سرعت متوسط وسايل نقليه) در صفوف بلند آزاد راه ها روند سازگاري را با آنچه كه بوسيله تئوري هيدروديناميك ترافيك پيش بيني شده است ارائه ميدهد. اين يافته اينطور نشان مي دهد كه ارزيابي صفوف بلند آزاد راه ها (فواصل مكاني و شرايط ترافيكي صفوف) مي تواند به خوبي بوسيله اين تئوري ساده توصيف شود. پس از توصيف اين روند و شرايط آن برخي از مفاهيم عملي اين يافته را ذكر مي كنيم.
بطور كلي يافته ها از طريق بازرسي نمودارهائي كه بر مبناي شمارش ترافيك آزاد راه بوسيله شمارشگرها (و همچنين تغييراتي كه در آنها داده شده است) رسم شده اند به دست آمده اند. اين روش تحليل اطلاعات تابع زماني توده وسايل نقليه بين شمارشگرها را آشكار مي كند و اين مساله براي كشف روند توصيف شده لازم است.
2- پيش زمينه
در نمونه هاي معين، تئوري هيدروديناميك ترافيك چگالي را در صفوف آزادراهها پيش بيني مي كند كه در دم بالاترين مقدار را دارد و به تدريج كاهش مي يابد تا به كمترين مقدار خود درست در بالا دست دهانه (گلوگاه) مي رسد. در شكل 1 اين مساله توضيح داده شده است. قسمت بالايي شكل امتدادي فرضي از يك آزاد راه را نشان مي دهد كه در بالا دست گلوگاه تعدادي تقاطع واقع شده اند.در اين شكل گلوگاه به علت قيد زمين نشان داده شده است كه مي تواند دلايل ديگري هم داشته باشد
. ترافيك در بخشهاي متشابه (فواصل بين تقاطع ها) بوسيله نموداري مشابه آنچه كه در بخش پائيني شكل ترسيم شده است شرح داده شده است. ظرفيت qmax، ماكزيمم جرياني است كه مي تواند در هر بخش بدون در نظر گرفتن تاثير خطوطي كه از پايين دست مي آيند برقرار باشد. اگر در هر صورت، صفي در پائين درست شكل گيرد و به عقب انتقال پيدا كند، جريان در همه بخشها تحت فشار قرار مي گيرد و مقادير كمتري نسبت به qmax بدست مي دهد.
اين جريان ها با روش ارائه شده توسط Newell (1993) به سادگي قابل تخمين هستند. تقاطع ها بصورت نقاط منفرد در طول آزاد راه مدل مي شوند. بنابراين به ازاء هر رمپ، خروجي ها و ورودي ها در اين نقاط موجودند. وسايلي كه از يك تقاطع به منطقه صف آزاد راه وارد مي شوند جريان وسايلي از تقاطع هاي مشابه از بالا دست مي آيند
را محدود مي كند يعني وسايل نقليه رمپ ورودي فضاي آماده راه را از وسايلي كه از بالا دست مي آيند مي گيرند. بنابراين اگر در هر تقاطع نرخ وسايلي كه از طريق رمپ هاي ورودي به آزاد راه وارد مي شوند بيشتر از نرخ وسايل خارج شونده توسط رمپ هاي خروجي باشد، جريان در بخشهاي متوالي بالا دست به تدريج كاهش مي يابد يعني جريان صف در بخش 1 برابر ظرفيت گلوگاه است
، جريان در بخش 2 برابر ظرفيت گلوگاه منهاي ريزش خالص از تقاطع 1 است و به همين طريق. مطابق آنچه كه در نمودار شكل 1 نشان داده شده است، هر كاهش در جريان صف كه در طول رخ مي دهد با يك افزايش در چگالي همراه است. (اين نمودار همچنين تغييرات سرعت متوسط وسايل را نشان مي دهد.) به بيان ديگر، رانندگان در حين حركت از دم صف به گلوگاه با بهبود يكنواخت شرايط ترافيك مواجه مي شوند.
ممكن است وقفه اي در اين روند در ناهمگوني ها (مثل تقاطع ها) رخ دهد. اين در صورتي است كه ترافيك در اين موقعيت ها با نمودار بخشهاي متشابه توصيف نشده باشد. حتي اين نكته هم متصور است كه ترافيك مي تواند بوسيله يك ايست در بخشهائي كه به قدر كافي در بالا دست گلوگاه هستند خرد شود. البته شرايطي را ذكر شد بدون شك كمياب هستند و به آنها نمي پردازيم.
پس مي توان نتيجه گرفت كه جريان در بخش صف شده آزاد راه وابسته به توده وسايل نقليه است اين موضوع زماني اهميت عملي پيدا مي كند كه براي مثال طراحي مد نظر باشد. اگر انتخاب نهائي استراتژي كنترل دسترسي از طريق مطالعه رمپ باشد، طرح هندسي تغيير مي كند و يا تابلوهاي راهنمائي راه براساس ارزيابي توده وسايل پايه گذاري مي شود.
وليكن كاملاً واضح نيست كه اين روند در چگالي صفوف تا چه اندازه روي طراحي تاثير مي گذارد و هنوز هم در كتابهاي ترافيك بحثي راجع به اين موضوع نشده است. ولي با اين همه اين تئوري به خوبي تعريف شده است و انطباق آن با اندازه گيريهاي واقعي در آزاد راه ها در اين تحقيق انجام مي گيرد.
مشاهدات ما نشان مي دهد كه زماني كه صف در آنسوي يك تبادل شروع به زياد شدن مي كند جريان وسايل آزاد راه در بالا دست برابر جريان همسايه پائين دست منهاي جريان خالص تبادل است.
اين جريان بالا دست معمولاً روند تقريباً ثابتي را نشان مي دهد (عليرغم وجود نوسانات) براي دوره هاي زماني طولاني. در طول اين زمان ها، چگالي بخش و جريان آن ارتباط تابعي با هم دارند يعني ترافيك در اينحالت با نمودار اساسي ترافيك همخواني دارد. بنابراين براي همه بخشها كه هندسه مشترك دارند يك منحني داريم.
هدف ما بررسي تئوري هيدروديناميك و كاربرد آن براي پيش بيني ترافيك معين مي باشد به عبارت ديگربررسي مي كنيم كه اين تئوري جزئيات كافي براي طراحي ارائه مي دهد.
يافته ما همچنين ملاك قابل قبولي براي اينكه چه زماني از مدلهاي ديگر بسط ترافيك استفاده كنيم ارائه مي دهد همچنين اين روش براي يافتن مكان گلوگاه بسيار مناسب است كه در اين رابطه در بخش 5 توضيحات بيشتري ارائه مي شود.3- اطلاعات
اطلاعات استفاده شده در اين پروژه در مدت زمان 2 روز (صبح) از امتداد
Queen Elizabet Way (شكل 2) گرفته شده اند.
شمارشگرها به شكل دواير كوچك نشان داده شده اند. ايستگاه شمارشگرها هم در هر خط موجود است كه در شكل نشان داده نشده اند. اين شمارشگرها اطلاعاتي شامل شمارش وسايل نقليه، سرعت متوسط زماني وسايل نقليه با وقفه هاي 20 ثانيهاي را ضبط مي كنند اعداد منتقل شده به ايستگاهها نيز نشان داده شده اند. هر يك از رمپهاي ورودي شكل 2 مطالعه شده اند. به جز رمپ پائين دست شمارشگرهاي 53.
شرايط اين امتداد بزرگراه براي شرح دادن و ثبات روند فوق مناسب ارزيابي شدهاند. ابتدا اينكه اين آزاد راه شامل سه خط عبوري بدون ناهمگوني آشكار است. ديگر اينكه در طول ساعت اوج اين آزاد راه، تعداد وسايل ورودي به آزاد راه از طريق رمپهاي ورودي بيش از تعداد وسايل خروجي است. بالاخره اينكه اثبات خواهيم كرد كه گلوگاه در جايي بين شمارشگرهاي 51 و 52 رخ مي دهد.
زيرا گلوگاه در جائي پائين دست رمپ و بدون ناهمگوني تشكيل مي شود.
زماني كه صف از اين گلوگاه در طول آزاد راه زياد مي شود، اندازه گيري چگالي جريان (متوسط) در هر يك از 5 بخش هاشور خورده (شكل 2) انجام شده است. اين 5 بخش با شماره هاي 1 تا 5 كه در جهت بالا دست افزايش مي يابند نشان داده شدهاند. سه عدد از اين بخش ها (بخش 2و4و5) بدون ناهمگوني هستند و دو عدد ديگر (بخش 1و3) داراي رمپ ورودي در بالا دست هستند. از اندازه گيري بدست آمده در مرز بخشها براي رسم منحني ها استفاده مي شود.
استفاده ما از نمودارها روند مورد انتظار را در 5 بخش هاشور خورده نشان مي دهد. همچنين نشان مي دهد كه مقادير اندازه گيري جريان و چگالي مقادير مناسبي دارد.
4- آناليز
شكل 3 نمودارهاي مجموع شمارش در مقابل زمان كه از شمارشگرهاي 50 تا 53 اندازه گيري شده اند را نشان مي دهد. اين نمودارها مربوط به ساعت اوج صبح 6 آوريل 1998 مي باشند. نقطه شروع نمودارها (N=0) مربوط به اندكي قبل از تشكيل صف در گلوگاه مي باشند.
شمارش هر نمودار با عبور يك وسيله مرجع شروع شده و شمارش در هر سه خط انجام شده است. به علاوه براي رسم نمودار 50 از تخمين وسايل رمپ ورودي استفاده شده است (بوسيله قانون بقاء در گرموتور پلهاي چيست و مشخصه هاي اساسي آن كدامند؟
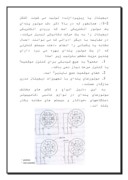
شكل 1-1 مقطع عرضي ساختار يك موتور پلهاي مدرن نمونه را نشان مي دهد؛ اين موتور به نام موتور رلوكتانس متغيير تك پشته اي خوانده مي شود. ما ابتدا با استفاده از اين شكل نحوه عملكرد اين ماشين را مطالعه خواهيم كرد. هسته استاتور داراي شش قطب يا دندانه برجسته مي باشد، روتور هم داراي چهار قطب است، هر دو هسته روتور و استاتور از جنس فولاد نرم هستند.
سه دسته سيم پيچي همانطور كه در شكل نشان داده شده، آرايش داده شده اند. هر دسته داراي دو كلاف است كه بصورت سري متصل شده اند. يك دسته از سيم پيچي ها فاز ناميده مي شود، و نتيجتاً اين ماشين يك موتور سه فاز است. جريان از يك منبع تغذيه DC از طريق كليدهاي I، II، III به سيم پيچي ها تامين مي شود.
در وضعيت (1)، سيم پيچي فاز I از طريق جريان كليد I تغذيه مي شود، يا به اصطلاح فني فاز I تحريك مي شود؛ شار مغناطيسي ناشي از تحريك كه در فاصله هوايي واقع مي شود با پيكانهايي نشان داده شده است. در وضعيت (1)، دو قطب برجسته استاتور فاز I كه تحريك شده اند با دو دندانه از چهار دندانه روتور هم رديف هستند. اين حالت از نظر ديناميكي يك حالت تعادل است.
هنگاميكه كليد II براي تحريك فاز II علاوه بر فاز I بسته مي شود، شار مغناطيسي در قطبهاي استاتور فاز II به حالت نشان داده شده در وضعيت (2) بوجود مي آيد، و گشتاوري در جهت عكس ساعتگرد بعلت “كشش” در خطوط خميده ميدان مغناطيسي بوجود مي آيد. از اينرو روتور سرانجام به وضعيت (3) خواهد رسيد.
از اينرو روتور با يك زاويه ثابت مي چرخد، كه “زاويه پله” خوانده مي شود، كه در اين مورد 15 درجه با انجام هر عمل سوئيچينگ است. اكنون اگر كليد I براي تخليه انرژي فاز I باز شود، روتور 15 درجه ديگر براي رسيدن به وضعيت (4) حركت خواهد كرد.
پس موقعيت زاويه اي روتور را مي توان برحسب واحدهاي زاويه پله از طريق فرآيند سوئيچينگ كنترل كرد. اگر سوئيچينگ به ترتيب انجام شود، روتور با حركتي پلهاي خواهد چرخيد؛ سرعت متوسط را هم مي توان از طريق فرآيند سوئيچينگ كنترل كرد.
امروزه، ادوات حالت جامد بعنوان سوئيچ هاي الكترونيكي در درايو يك موتور پلهاي بكار مي روند، و سيگنال هاي سوئيچينگ توسط ICهاي ديجيتال يا ريزپردازنده توليد مي شوند (شكل 2-1). همانطور كه در بالا ذكر شد، موتور پلهاي يك موتور الكتريكي است كه ورودي الكتريكي ديجيتال را به يك حركت مكانيكي تبديل ميكند. در مقايسه با ديگر ادواتي كه مي توانند اعمال مشابه يا يكساني را انجام دهند، سيستم كنترلي كه از يك موتور پلهاي بهره مي برد داراي چندين مزيت مشخص بترتيب زير است:
1. معمولاً به هيچ فيدبكي براي كنترل موقعيت يا كنترل سرعت نياز نمي باشد.
2. خطاي موقعيت جمع ناپذير است.
3. موتورهاي پلهاي با تجهيزات ديجيتال مدرن سازگار هستند.
به اين دليل، انواع و كلاس هاي مختلف موتورهاي پلهاي در لوازم جانبي كامپيوتر، دستگاههاي خودكار، و سيستم هاي مشابه بكار رفته اند.
2-3- تاريخچه ابتدايي موتورهاي پلهاي
در شماره اي از [1]JIEE چاپ سال 1927 مقاله اي با عنوان “كاربرد الكتريسيته در ناوهاي جنگي” وجود داشت، و بخشي از اين مقاله يك موتور پلهاي رلوكتانس متغيير سه فاز از نوع فوق را تشريح مي كرد كه براي كنترل از راه دور نشانگر جهت تفنگها و لوله هاي اژدرافكن در ناوهاي جنگي انگليسي بكار رفته بود
. همانطور كه در شكل 3-1 نشان داده شده، يك كليدگردان مكانيكي براي سوئيچينگ جريان تحريك بكار رفته بود. يك دور چرخش هندل شش پالس پلهاي توليد مي كند كه باعث 90 درجه حركت روتور مي شود. حركت روتور در پله هاي 15 درجه بمنظور رسيدن به دقت موقعيتي لازم كاهش مي يابد.
در اين مقاله اشاره شده بود كه در طراحي اين موتور پلهاي ظاهراً ساده فاكتورهاي بسياري مي بايست مورد توجه قرار گيرند و احتياطهاي بسياري بمنظور عملكرد مطلوب و مطمئن لحاظ شوند. اين ماشين نياز به نسبت بالاي گشتاور به اينرسي اجزاء متحرك بمنظور اجتناب از دست دادن پله دارد، و ثابت زماني، نسبت اندوكتانس مدار به مقاومت، بايستي كوچك باشد تا به سرعت عملكرد بالايي دست يافت. اين مسائل هنوز هم در موتورهاي مدرن وجود دارند.
براساس مقالهاي[2] در IEEE Transactions on Automatic Control، موتورهاي پلهاي بعدها در نيروي دريايي ايالات متحده با هدفي مشابه بكار گرفته شدند. با اينكه كاربردهاي عملي موتورهاي پلهاي مدرن در دهه 1920 واقع شد، اشكال اوليه موتورهاي رلوكتانس متغيير به واقع از قبل وجود داشتند. در مقاله اي نوشته [3]Byrne آمده است: “موتورهاي رلوكتانس از نوع پله اي، كه اكنون بعنوان ادوات تعيين موقعيت بكار مي روند، مثل “ماشين هاي بخار الكترومغناطيسي”، موتورهاي الكتريكي نيمه قرن نوزدهم بودند”. ما در اينجا به دو نوع اختراع قابل ذكر در سالهاي 1919 و 1920 در انگلستان مي پردازيم.
1- ساختار دندانه اي براي به حداقل رساندن زاويه پله. امتياز اختراعي در انگلستان در سال 1919 توسط يك مهندس عمران در آبردين، اسكاتلند، بنام C.L.Wakler بخاطر اختراع نوعي ساختار موتور پلهاي اخذ شد كه قادر بود با زاويههاي پله كوچك حركت كند. هر يك از قطبهاي برجسته داراي يك گروه دندانه كوچك است. دندانه هاي روتور در گام يكسان با دندانههاي كوچك استاتور ميباشند،
هنگاميكه فاز I تحريك مي شود و شار مغناطيسي در طول مسيري كه با منحني خط چين روي شكل نشان داده شده واقع مي شود، گروههاي دندانه ها در اين فاز با برخي دندانه هاي استاتور همانطور كه در شكل (b) 4-1 نشان داده شده هم رديف ميشوند
. در اين آرايش، دندانه هاي روتور و استاتور در فازهاي II و III بايستي به اندازه 3/1 گام دندانه در جهات متقابل ناهمرديف شوند. هنگاميكه جريان تحريك از فاز I به فاز II سوئيچ مي شود، روتور در جهت ساعتگرد به اندازه يك زاويه پله كه در اين مورد 75/3 = 3/ (32/360) مي باشد خواهد چرخيد.
بهرحال اگر جريان تحريك به فاز III سوئيچ شود، چرخش در جهت عكس ساعتگرد با همان زاويه كوچك خواهد بود. Walker در مشخصات اختراع ثبت شده طرحي را براي ساخت نوعي از موتور پلهاي كه امروزه به نام نوع رلوكتانس متغيير چند پشتهاي خوانده مي شود به همراه طرحهايي براي ساخت يك موتور خطي ارائه كرد. بهرحال در دهه 1950 بود كه موتورهاي پلهاي مدرن كه از اساس اين اختراع بهره مي بردند بصورت تجاري عرضه شدند.
2- توليد گشتاوري بزرگ از يك ساختار ساندويچي. C.B.Chicken و J.M.Thain در نيوكاسل در تين به سال 1920، امتياز اختراعي را در آمريكا[5] بخاطر اختراع يك موتور پلهاي كه مي توانست گشتاور بزرگي به ازاي واحد حجم روتور توليد نمايد به ثبت رساندند.
كه ويژگي قابل ذكر آن فولاد نرم روتور است كه پي در پي از بين دو هسته الكترومغناطيس متقابل مي كند. اين ساختار كه در آن دندانه هاي روتور بوسيله دندانه هاي استاتور احاطه شدهاند تنها ساختار شناخته شده ايست كه مي تواند بزرگترين گشتاور را از واحد حجم روتور توليد كند.اما در دهه 1970 بود كه يك موتور پلهاي با بهره گيري از اين قاعده بعنوان يك موتور پلهاي قدرت در ماشينهاي كنترل عددي (NC) ساخت شركت ژاپني Fanuc Ltd بكار گرفته شد.
3-3- فعاليتهاي دانشگاهي
در اواخر دهه 1950 تحقيقات بسياري روي موتورهاي پلهاي در دانشگاهها و آزمايشگاههاي شورهاي پيشرفته صنعتي آغاز شد. نتايج تحقيقات در مجلات و ژورنالهاي فني منتشر شدند. دردهه 1970، دو گردهمايي بينالمللي برگزار شد كه متخصصين گروههاي صنعتي و دانشگاهي از سراسر جهان براي تبادل گزارشات گردهم آمدن
و بحث هايي را انجام دادند. يكي از آنها “سمپوزيوم سيستمها و ادوات كنترل حركت پيشرفته” بود كه سالانه تا سال 1972 با رياست پرفسور B.C.kuo از دانشگاه Illinois در Urbana-Champaign برگزار شد، و گردهمايي ديگر “كنفرانس بينالمللي ادوات و موتورهاي پلهاي” با رياست پرفسور P.J.Lawrenson از دانشگاه Leeds انگلستان كه تا كنون سه بار (در سالهاي 1974، 1976، 1979) برگزار شده است. موتور پلهاي همچنين به عنوان موضوعي در “كنفرانس بينالمللي ماشينهاي الكتريكي كوچك” كه توسط انستيتوي مهندسين برق در لندن به سال 1976 برگزار شد، انتخاب گرديد.
4- طرح كلي موتورهاي پلهاي مدرن
در فصل پيش پيشرفت هاي تاريخي موتورهاي پلهاي را در رابطه با تكنولوژي كنترل عددي دنبال كرديم. در اين فصل، نگاهي كلي به انواع گوناگون موتورهاي پلهاي كه در حال حاضر بكار مي روند خواهد شد، و ساختار و اصول اساسي آنها بدون استفاده از روابط رياضي بررسي خواهند شد. اصطلاحات فني كه در رابطه با موتورهاي پلهاي بكار مي روند تعريف و معاني آنها بررسي خواهد شد.
1-4- سيستم هاي كنترل حلقه- باز
بطور كلي، موتورهاي پلهاي توسط مدارات الكترونيك، اكثراً با منبع تغذيه DC، كار مي كنند. موتور پلهاي در مقايسه با موتورهاي معمولي AC يا DC، كه اكثراً بطور مستقيم از يك منبع تغذيه درايو مي شوند، يك موتور منحصر بفرد مي باشد. بعلاوه، موتورهاي پلهاي در كنترل سرعت و موقعيت بدون حلقه هاي فيدبك پرهزينه كاربرد پيدا مي كنند. اين روش درايو به نام درايو حلقه- باز خوانده مي شود. اين بخش به اصول كنترل حلقه- باز موتورهاي پلهاي خواهد پرداخت. جزئيات مدارات الكترونيك عملكرد حلقه- باز در فصل 5 مورد بحث قرار گرفته اند.
با اينكه كنترل حلقه- باز از نظر اقتصادي روش درايو با صرفه اي است، از محدوديت رها نيست. بطور مثال، چرخش روتور در محدوده هاي سرعت مشخصي بشكل نوساني و ناپايدار در مي آيد، و بخاطر اين مشخصه رفتاري، سرعت و شتاب يك موتور پلهاي كنترل شده توسط يك طرح حلقه- باز نمي تواند به سرعت يك موتور DC درايو شده توسط يك طرح كنترل- فيدبك باشد.
از اينرو، در تلاش براي گسترش محدوده هاي كاربردي، توقف نوسان مساله اي اساسي است كه بايستي حل شود. كنترل حلقه- بسته كه روش درايو موثر بدور از ناپايداري بوده و قادر به افزايش سرعت سريع مي باشد.
1-1-4- تركيب سيستم
براي درك تركيب اساسي سيستم درايو موتور پله اي، درايو يك نوار پانچ را كه در ماشينهاي كنترل عددي بكار رفته بررسي مي كنيم. يك پانچ كننده نوار از يك موتور پلهاي براي فرستادن نوار كاغذ استفاده مي كند. دستورالعمل هاي كاري ماشينهاي كنترل عددي به شكل سوراخهاي ايجاد شده توسط اين وسيله ذخيره شدهاند.
موتور پلهاي بكار رفته براي اين منظور معمولاً يك موتور دو- سه يا چهار فاز مي باشد. در اينجا يك موتور سه فاز شامل سه دسته سيم پيچي را بررسي مي كنيم.
مهمترين ويژگي موتور پلهاي اين است كه با يك زاويه ثابت به ازاي هر پالس اعمال شده به توالي ساز منطقي مي چرخد. مقدار نامي اين زاويه (درجه) زاويه پله خوانده مي شود.
با دريافت يك پالس دستور پله، توالي ساز منطقي فازي را كه بايد تحريك (يا انرژي دار) شود و فازي را كه بايستي تخليه انرژي شود تعيين مي كند، و سيگنالهايي به درايور موتور كه طبقه كنترل كننده جريان تحويلي به موتور مي باشد، مي فرستد. توالي ساز منطقي معمولاً با تراشه هاي مدار مجتمع TTL يا CMOS ساخته مي شود. هنگاميكه پتانسيل يك كانال خروجي توالي ساز منطقي در سطح H (=بالا) مي باشد،
درايور قدرت براي تحريك فاز متناظر سيم پيچي عمل مي كند. بطور مشابه، اگر خروجي در سطح L باشد، فاز همشماره تحريك نمي شود، يا خاموش مي شود. همانطور كه در شكل 3-2 نشان داده شده، اگر موتور با ترتيب تحريك …1 3 2 1 در جهت ساعتگرد (CW=) حركت كند،
جهت چرخش با ترتيب عكس…1 2 3 1 در جهت عكس ساعتگرد (CCW=) خواهد بود. در سيستم پانچ نوار، ترتيب معمولاً براي فرستادن نوار در يك جهت ثابت است. بطور كلي، هيچ قاعده مشخصي براي تعيين اينكه كدام جهت ساعتگرد يا عكس آن است وجود ندارد، موتوري كه از يك سر در جهت ساعتگرد مي چرخد اگر از سر ديگر ديده شود بنظر مي رسد كه در جهت عكس ساعتگرد حركت مي كند. جهت چرخش معمولاً با تطبيق بخشهاي مورد نظر معين مي شود.
در اين جا فازها با Ph1، Ph2، Ph3 و غيره نشان داده شده اند. يا PhA، PhB براي برخي موتورهاي دو فاز. تحريك بكار رفته در شكل 3-2 تحريك تكفاز يا يكفاز خوانده مي شود، و به اين معني است كه به يك فاز از سه فاز (يا از چهار فاز در يك موتور چهار فاز) در هر لحظه توان تحويل داده مي شود. تحريك تكفاز اغلب به منظور تشريح اصول اساسي موتورهاي پلهاي ذكر مي شود. اما هميشه بهترين روش درايو كردن نيست.
2-1-4- پله و نمو
دادهها در هشت رديف روي يك نوار ضبط شده اند؛ به اين معني كه، در هر خط هشت سوراخهاي راهنما وجود دارند كه دندانه هاي چرخ دنده به آنها وارد ميشوند. خطوط در فواصل 10/1 اينچي (mm45/2) قرار داده شده اند. هنگام ذخيره دادهها روي يك نوار بوسيله نوار پانچ كن دستي يا كامپيوتر، نوار mm45/2 جلو رانده ميشود، براي پانچ يك خط متوقف مي شود،
و سپس به اندازه mm45/2 ديگر جلو برده مي شود و دوباره متوقف مي شود، و همينطور. ساده ترين راه براي پيش راندن نوار به اندازه گام يك خط اعمال يك پالس واحد به توالي ساز منطقي مي باشد، به اين ترتيب موتور به اندازه يك پله درايو شده، چرخ دنده با زاويه اي معادل يك پله چرخانده مي شود، و از اينرو نوار به اندازه mm45/2 رانده مي شود.
اما روش ديگر درايو موتور پلهاي به اندازه چندين زاويه پله براي پيش راندن نوار به اندازه يك خط است. بعنوان مثال، يك موتور چهار فاز با زاويه پله 8/1 را مي توان براي پيش راندن نوار به اندازه گام يك خط با چهار پله بكار برد. قطر چرخ دنده به اندازه يك چهارم كاهش مي يابد، و در نتيجه، اينرسي چرخ دنده به اندازه 256/1=4 (4/1) برابر از چرخ دنده بكار رفته در روش حركت تك پلهاي كمتر خواهد بود.
حركت واحدي كه نوار كاغذي را به اندازه يك گام خط، در مورد بالا mm45/2، پيش مي راند، اغلب يك نمو ناميده مي شود. يك نمو توسط يك پله واحد در مثال اول، و با چهار پله در مثال پيش تحقق مي يابد. در موتور مدت زمان مشخصي بعد از تكميل حركت يك نمو توقف مي كند، تا نوار پانچ شود، و اين چرخه خود را تكرار مي كند. اين نوع از حركت تكراري شروع و توقف “حركت نموي ” ناميده مي شود، و كنترل مربوط به اين نوع عملكرد “كنترل حركت نموي” خوانده مي شود.
تعداد پله ها در هر نمو اغلب بيش از چهار مي باشد، بطور مثال در نوار خوان (شكل 6-2). هنگاميكه داده روي نوار به كنترلر ماشين كنترل عددي منتقل مي شود، عمليات بلوك به بلوك انجام مي گيرد. يك بلوك از دادهها متشكل از تعدادي خط يا بايت بطور مثال 32، 48 يا 68 خط، مي باشد، و اين تعداد برحسب سيستم يا مورد متفاوت است
. قبل از اينكه ابزاري حركت كند، يك بلوك از دادهها به حافظه حالت- جامد كنترلر منتقل مي شود، و ابزار بنحويكه در اوليه بلوك دادهها دستور داده شده حركت مي كند. بعد از اينكه آن دستورات كامل شدند، بلوك بعدي دادهها توسط هد خواندن نوار خوان خوانده مي شود. اگر سيستم براي درايو به اندازه يك گام خط در يك پله واحد طراحي شده باشد،
و بلوك متشكل از 32 خط يا بايت باشد، هر حركت از 32 پله تشكيل شده است. اگر يك گام خط با چهار پله درايو شود، يك نمو حركت با 128 پله براي انتقال 32 بيت داده انجام مي گيرد. اگر يك حركت با نمو شامل پلههاي چندگانه باشد بايستي يك طبقه ديگر قبل از توالي ساز منطقي قرار داده شود. طبقه مربوط به اين كار در اين كتاب «كنترلر ورودي» ناميده مي شود. كنترلر ورودي قطاري از تعدادي پالس مشخص در فواصل مناسب را پس از دريافت يك سيگنال ورودي ارسال مي كند.
2-4- ويژگيهاي موتورهاي پلهاي از نقطه نظر كاربرد
نگاهي به ويژگي هاي كنترل حلقه- باز موتورهاي پلهاي مي اندازيم، و چند اصطلاح فني را تشريح مي كنيم.
1-2-4- زاويه پله كوچك و چگونگي دستيابي به آن
يك موتور پلهاي با يك زاويه ثابت به ازاي هر پالس ميچرخد. همانطور كه پيشتر توضيح داده شد، مقدار نامي آن “زاويه پله” يا در بعضي كتابها[1] طول پله ناميده ميشود و برحسب درجه بيان مي شود. كاهش زاويه پله دقت تعيين موقعيت را افزايش مي دهد. يك ويژگي موتورهاي پلهاي اين است كه مي توانند يك زاويه پله كوچك را تحقق بخشند. مهندسين به تعداد پله بر دور توجه دارند، كه در اين جا با S نشان داده شده است و به روشني زاويه پله با S طبق رابطه زير مرتبط است:
=360/S (1-2)
S به تعداد دندانه هاي روي روتور (Nr) و تعداد فازها m طبق روابط زير مرتبط است، براي موتورهاي رلوكتانس متغيير
S=mNr 2-2)a(
يا براي موتورهاي آهنرباي دائمي و موتورهاي هيبريد كه بعداً بررسي خواهند شد
S=2mNr 2-2)b(
تعداد معمول فازهاي موتورهاي رلوكتانس متغيير 3،4و5 مي باشد، و معمول ترين موتور هيبريد دو فاز دارد ولي انواع سه و پنج فاز هم موجودند. بطور مثال تعداد زياد دندانه هاي روتور، Nr، 50 يا 100 مي باشد.
موتورهاي طراحي شده به منظور استفاده در درايو گردونه هاي كاراكتر (شكل
7-2) در يك چاپگر يا ماشين تايپ داراي 96، 128 يا 132 پله بر دور مي باشند. يك موتور دو يا چهار فاز استاندارد 200 پله دارد. برخي موتورهاي دقيق براي دستيابي به يك دور با 500 يا 1000 پله طراحي شده اند. بهرحال، زواياي پله در برخي موتورهاي ساده به بزرگي 5/7، 15 هستند، و يك موتور مخصوص بكار رفته در ساعت مچي داراي يك زاويه پله 180 مي باشد.
2-2-4- گشتاور بازيابي و نگهدارنده بالا
موتورهاي پلهاي طوري طراحي شده اند كه گشتاور استاتيك بزرگي داراي توليد مي شود. اين امر موتور را قادر به راه اندازي وتوقف سريع و نشان دادن يك گشتاور بازيابي قوي به هنگام جابجايي از موقعيت سكون ناشي از گشتاور بار مي كند. همانطور كه بعداً بحث خواهد شد، فاصله هوايي بين دندانه هاي روتور و استاتور تا حد امكان براي اين منظور كوچك طراحي شده است. ما اغلب از اصطلاحات گشتاور نگهدارنده، و گشتاور “گيره ” در رابطه با گشتاور استاتيك استفاده مي كنيم. تعريف آنها بصورت زير است:
1. گشتاور نگهدارنده. بعنوان گشتاور استاتيك ماكزيمم اعمال شده به محور يك موتور تحريك شده با جريان نامي در يك حالت مشخص بدون بروز چرخش پيوسته تعريف مي شود.
2- گشتاور گيره. بعنوان گشتاور استاتيك ماكزيمم اعمال شده به محور يك موتور تحريك نشده بدون بروز چرخش پيوسته تعريف مي شود.
بطور كلي، هرچه گشتاور نگهدارنده بزرگتر باشد، خطاي موقعيت ناشي از بار كوچكتر است در حالت ايده آل، گشتاور نگهدارنده از فاز يا فازهايي كه تحريك شدهاند مستقل است. هنگاميكه تغييرات قابل توجهي ديده مي شود، گشتاور نگهدارنده يك موتور حداقل مقدار گشتاورهاي استاتيك مينيمم اندازه گيري شده در تمامي حالات ممكن، بطور مثال در سه حالت يك موتور مي باشد.
ه) در نتيجه فاصله عمودي بين نمودارها توده (مجموع) وسايل نقليه بوده است كه بين شمارشگرها رخ داده است در هر حال، هر نمودار در شكل 3 (و محور زمان متشابه) بوسيله متوسط فرضي زمان سفر جريان آزاد بين شمارشگر مخصوص خود و شمارشگر 53 به سمت راست منتقل شده است
. بنابراين فاصله عمودي بين نمودارها برابر است با توده وسايل اضافه بين شمارشگرها ناشي از تاخير مربوط به وسايل نقليه. انتقال نمودارها به اين روش سودمند است زيرا دو نمودار روي هم گذاشته شده نشان مي دهد كه ترافيك در ناحيه تداخلي آزادانه جريان داشته است نمودار به كمك درونيابي خطي از شمارش ها در هر 20 ثانيه رسم شده اند.
