









بخشی از پاورپوینت
--- پاورپوینت شامل تصاویر میباشد ----
اسلاید 1 :
مقدمه
lیکی از مهمترین وظایف هر سیستم خودکار دریافت دانش از محیطش میباشد.
lاینکار از طریق بکار گیری سنسورهای مختلف و استخراج اطلاعات مفید از داده های اندازه گیری شده میباشد.
lرنج وسیعی از سنسورها در روباتهای خودکار مورد استفاده قرار میگیرد. در این فصل سنسورهائی مورد توجه قرار خواهند گرفت که برای دریافت اطلاعات از محیط بکار میروند.
اسلاید 2 :
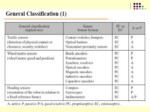
دسته بندی سنسورها
lداخلی: اطلاعاتی را از داخل روبات اندازه گیری میکنند. مثل: سرعت موتور، زاویه مفصل ها، ولتاژ باتری وغیره
lخارجی: اطلاعاتی را از محیط روبات جمع آوری میکنند: اندازه گیری مسافت، شدت نور، دامنه صدا
lPassive: سنسور انرژی را از محیط دریافت میکند مثل سنسور حرارتی، CCD ، و میکروفن
lActive: انرژی را به محیط فرستاده وعکس العمل محیط در مقابل آنرا اندازه گیری میکند.
اسلاید 3 :
اندازه گیری کارائی سنسورها
lDynamic Range
lعبارت است از دامنه حد بالا و پائین مقادیر ورودی به سنسور به نحویکه سنسور قادر به عملکرد عادی خود باشد.
DR= Maximum Input/Minimum Input
lمعمولا بر حسب دسیبل بیان میشود.
اسلاید 4 :
lResolution
lحداقل اختلاف بین دو مقداری که توسط سنسور قابل دریافت است
lLinearity
lنحوه رفتار خروجی یک سنسور نسبت به تغییرات سیگنال ورودی را مشخص میکند
lیک رفتار خطی با رابطه زیر مشخص میشود.
F(ax+by)= aF(x)+ bF(y)
اسلاید 5 :
lBandwidth or Frequency
lبرای اندازه گیری سرعت سسک سنسور در آماده کردن دنباله ای از خروجی ها بکار میرود. بعبارت دیگر تعداد اندازه گیری های سنسور در ثانیه را به فرکانس تعبیر میکنند
lSensitivity
lعبارت است از معیاری از میزان تغییرات جزئی در سیگنال ورودی که میتواند باعث تغییر در خروجی شود:
Output change / Input change
اسلاید 6 :
lCross Sensitivity
lعبارت است از حسساسیت به پارامترهای محیطی که متعامد با سیگنال اصلی هستند
lیک قطب نما میتواند در جهت یابی روبات بر اساس میدان مغناطیسی زمین بسیار مفید باشد. اما این وسیله علاوه بر میدان مغناطیسی زمین به مصالح ساختمانی فلزی نیز حساسیت دارد. در نتیجه استفاده از آن برای روباتب که در محیط اتاق حرکت میکند چندان مفید نخواهد بود.
اسلاید 7 :
Dead-reckoning localization
lاین روش مبتنی بر استفاده از سنسورهای داخلی است و معمولا با استفاده از انکدرها و سایر سنسورها تغییرات موقعیت و جهت نسبت به فریم مرجع روبات اندازه گیری میشود.
lمعمولا فیدبکی از محیط دریافت نمیشود. لذا احتمال بروز خطا در این روش وجود دارد.
l روشی ساده وسریع است.
lمعمولا در ترکیب با سایر روشها استفاده میشود.
اسلاید 8 :
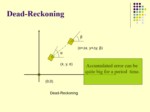
Dead-Reckoning
A robot’s path as obtained by its odometry,
relative to a given map.
اسلاید 9 :
Introduction to GPS
lWhat is GPS
lThe Global Positioning System (GPS) is a worldwide radio-navigation system formed from a constellation of 24 satellites and their ground stations
lGPS receivers use these satellites as reference points to calculate positions and time
lOriginally known as Navigation System with Timing And Ranging (NAVSTAR)
