



بخشی از مقاله
طراحی و ساخت مکانیزم حرکت بدون چرخ در زمینهای کشاورزی
چکیده
مکانیزم حرکت بدون چرخ به منظور انجام عملیات در مزارع کشاورزی طراحی و ساخته شده است. مهمترین توانایی این سیستم قابلیت حرکت در انواع زمینهای کشاورزی می باشد. وجه تمایز سیستم حرکت بدون چرخ با دیگر ادوات کشاورزی حذف چرخها از ساختار حرکتی می باشد و به عبارتی این سیستم برای حرکت از مکانیزمی شبیه به پا بهره می گیرد که این ویژگی باعث مانور پذیری سیستم در انواع زمینهای کشاورزی از جمله شالیزارها شده است، همچنانکه آسیب رسیدن به محصولات و خاک کشاورزی به میزان قابل توجهی کاهش می یابد. اجزاء تشکیل دهنده ی سیستم حرکت بدون چرخ شامل گیربکس ها، موتورها، تسمه ها، سیستم حرکتی، شفت ها و اتصالات مربوطه، سیستم حرکتی، سیستم بالا برنده، چرخهای جهتی، میکرو کنترلر، آی سی تقویت کننده ولتاژ، پروگرامر، رله ها و کنتاکتورها می باشد. علاوه بر این، ملاحظات و تحلیل های لازم جهت اندازه ها و شکل های هندسی صورت گرفته است تا نیروها به صورت مناسبترین الگوی ممکن قرار گیرد و بدین وسیله علاوه بر داشتن استحکام لازم به دستگاه، بتوانیم نیروهای قطعه و اندازه های آن را در کمترین حد ممکن نگه داریم. لذا سیستم برای حرکت به جهات مختلف از دو بازوی ریلی که به صورت قاب بر روی شاسی قرار گرفته اند بهره می برد . هر کدام از این بازوها از چهار شاخه نبشی ساخته شده اند که ساختاری مانند یک مکعب مستطیل دارند. بازوهای ریلی که در قسمت حرکتی سیستم به کار گرفته شده اند دارای مزیتهای مهمی از جمله توانایی حرکت سیستم در انواع زمینهای کشاورزی و مصرف بسیار پایین انرژی الکتریکی برای حرکت دادن سیستم به دلیل پایین بودن اصطکاک بین بازوها و شاسی می باشد. قرار گرفتن بازوها بر روی شاسی مهمترین مکانیزمی می باشد که برای سیستم در نظر گرفته شده است. بازوها از طریق 16 عدد بلبلرینگ بر روی شاسی سوار شده اند و توسط بلبلرینگها این قابلیت را پیدا می کنند که به سهولت بر روی شاسی لغزش داشته باشند . سیستم برای حرکت به جهت های مختلف از دو عدد موتور DC سری که بر روی شاسی قرار گرفته اند بهره می برد. هر کدام از این موتورها از طریق یک گیربکس جفت خورشیدی و تسمه ها نیرو را به بازوهاانتقال می دهند. 8 پایه ی سیستم که به صورت جفت در کنار هم قرار گرفته اند، در زیر بازوهای حرکتی قرار گرفته اند به طوریکه در زیر هر بازو 4 پایه نصب شده است. سیستم از این پایه ها برای تنظیم ارتفاع خود به هنگام حرکت در مزارع کشاورزی و همچنین ایجاد تکیه گاه و تعادل بهره می برد. همچنین، سیستم مذکور دارای 8 تسمه می باشد که عامل انتقال قدرت از شفت گیربکسها به بازوها می باشند. با حرکت کردن هر کدام از بازوها، مکانیزم بالا وپایین برنده ی پایه ها، پایه های متصل به بازوی متحرک را از سطح زمین بلند کرده و پس از اتمام حرکت، دوباره پایه ها را بر روی زمین قرار می دهد. در نهایت، برای کنترل حرکتهای سیستم از میکروکنترلر ATMEGA32 و تقویت کننده ی ULN 2003 استفاده شده است.
کلمات کلیدی: حرکت، چرخ، پا، ربات، کشاورزی، ادوات
مقدمه
همواره در کشاورزی، این چالش مطرح بوده است که تردد چرخها در زمین کشاورزی، موجب آسیب رسانیدن به خاک و محصولات کشاورزی میشود. در این تحقیق تلاش بر این بوده است تا با ابداع و ساخت مکانیزمی، که به عنوان اختراع به شماره ی 013823 به ثبت رسیده است، در جهت رفع و یا به حداقل رسانیدن این نقیصه عمل گردد.
اجزاء اصلی تشکیل دهنده سیستم حرکت بدون چرخ :
سیستم حرکت بدون چرخ شامل شاسی، گیربکس ها، موتورها، تسمه ها، سیستم حرکتی، شفت ها و اتصالات مربوطه، سیستم حرکتی، شفت ها و اتصالات مربوطه، سیستم بالا برنده، چرخهای جهتی، میکرو کنترلر، آی سی تقویت کننده ولتاژ، پروگرامر، رله ها و کنتاکتورها می باشد که در ادامه به شرح آنها می پردازیم.
شاسی ربات :
سیستم شاسی ربات به گونه ای طراحی شده است که تحمل وزن زیا دی را داشته باشد. چون تمام قسمت ها ی ربات بر روی شاسی مستقر می شوند. مواد اصلی که در مهندسی مکانیکبرای قطعات تحت بارهای نسبتاً سنگین مورد استفاده قرار می گیرد عبارتند از: چدن ،فولاد ریخته گری شده ،فولاد و فلزات سبک وزن. در مواردی که نیروهای بسیار سنگین مورد نظر باشد از فولاد استفاده می شود. بنابراین جنس شاسی ربات را فولاد انتخاب کردیم که ویژگیهایی از قبیل وزن مناسب، تحمل بار مکانیکی، مقاومت در برابر محیط جوی، مقاومت در برابر محیط شیمیایی، کیفیت ناصافی سطح، عمر زیاد، عاری بودن از صدا، قابلیت اطمینان، استاندارد بودن فولاد، هزینه مناسب و در دسترس بودن فولاد را دارا می باشد.
اثر بار مکانیکی بر طراحی شکل:
سیستم هر جسم فضایی را اشغال می کند واندازه ها وشکل هایی خاص دارد که طراح باید قبل از همه از نظر ملاحظات مختلف آنها را تعیین کند. برای طراح، ملاحظه ی نیروهای مکانیکی اولین نقطه شروع در تعیین شکل و اندازه ی قطعات مختلف محسوب می شود. هر قطعه ای از یک ماشین یا دستگاه نیروهایی را انتقال می دهد که عمدتاً به طرح کلی بستگی دارد. بنابراین طراح باید اطمینان حاصل کند که نیرو ها به صورت مناسبترین الگوی ممکن قرار گرفته اند تا بدین وسیله بتوان نیروهای قطعه و اندازه های آن رادر کمترین حد ممکن نگه داشت. باید توجه داشت که شکل هندسی قطعه استحکام آن را تحت تاثیر قرار می دهد. بنابراین شاسی ربات به صورت شکل 1 طراحی شده است. شکل 2 نمای سه بعدی شاسی ربات را نمایش می دهد. شکل 3 نمای شاسی ربات را از دید کنار نشان می دهد.
بازوهای ریلی :
سیستم برای حرکت به جهات مختلف از دو بازوی ریلی که به صورت قاب بر روی شاسی قرار گرفته اند بهره می برد. هر کدام از این بازوها از چهار شاخه نبشی ساخته شده اند که ساختاری مانند یک مکعب مستطیل دارند. طول هر کدام از این بازوها تقریبا 2.5 متر می باشد،بنابراین از آنجایی که شاسی در میان این بازوها قرار گرفته،هر گام حرکتی برای سیستم،به هر سمت تقریبا cm 90 می باشد. بازوهای ریلی که در قسمت حرکتی سیستم به کار گرفته شده اند دارای مزیتهای مهمی از جمله توانایی حرکت سیستم در انواع زمینهای کشاورزی و مصرف بسیار پایین انرژی الکتریکی برای حرکت دادن سیستم به دلیل پایین بودن اصطکاک بین بازوها و شاسی می باشد. در واقع استفاده از این بازوها باعث حذف چرخها برای حرکت و قدرت مانور پذیری سیستم در حرکت کردن از زمینهای کشاورزی مختلف از جمله شالیزارها شده است. شکل 4 نمای بازو را از دید کنار نشان می دهد و شکل 5 نمای سه بعدی بازو را نمایش می دهد.
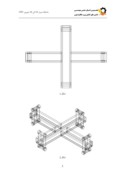
نحوه استقرار بازوها بر روی شاسی :
قرار گرفتن بازوها بر روی شاسی مهمترین مکانیسمی می باشد که برای سیستم در نظر گرفته شده است. بازوها از طریق 16 عدد بلبلرینگ بر روی شاسی سوار شده اند و توسط بلبلرینگها این قابلیت را پیدا می کنند که به سهولت بر روی شاسی لغزش داشته باشند. با استقرار این بازوها بر روی شاسی مکانیسم حرکت سیستم به جهت های مختلف تشکیل می گردد.
بازوهای سیستم به نحوی بر روی شاسی قرار گرفته اند که این دو بازو قابلیت حرکت در داخل یکدیگر را دارا می باشند و با استفاده از این مزیت سیستم قادر به حرکت در جهات مختلف شده است. شکل 6 نحوه قرار گرفتن بازوها بر روی شاسی را به صورت سه بعدی نمایش می دهد. شکل 7 استقرار بازوها بر روی شاسی را از دید بالا نشان می دهد و شکل 8 این مکانیسم را از دید کنار نشان می دهد.
