






بخشی از پاورپوینت
اسلاید 1 :
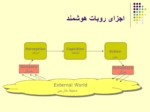
اجزای روبات هوشمند
Perception
حس کردن، ساخت مدلی از دنیای اطراف
Cognition
رفتارها، انتخاب عمل، طرح ریزی، یادگیری
همکاری بین چند روبات، کار تیمی
پاسخ به محیط، یادگیری چند عاملی
Action
حرکت، ناوبری، پرهیز از موانع
اسلاید 2 :
دریافت دانش از محیط
یکی از مهمترین وظایف هر سیستم خودکار دریافت دانش از محیطش میباشد.
اینکار از طریق بکار گیری سنسورهای مختلف و استخراج اطلاعات مفید از داده های اندازه گیری شده میباشد.
رنج وسیعی از سنسورها در روباتهای خودکار مورد استفاده قرار میگیرد. در این فصل سنسورهائی مورد توجه قرار خواهند گرفت که برای دریافت اطلاعات از محیط بکار میروند.
اسلاید 3 :
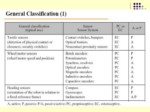
برخی سنسور های متداول
Tacti e sensors
contact switch, bumpers…
Infrared sensors
Ref ective, proximity, distance sensors…
U trasonic Distance Sensor
Inertia Sensors (measure the second derivatives of position)
Acce erometer, Gyroscopes,
Orientation Sensors
Compass, Inc inometer
aser range sensors
Vision, GPS, …
اسلاید 4 :
Sensor Fusion
در روباتهای سیار معمولا از تعداد زیادی سنسور استفاده میشود زیرا یک سنسور ممکن است کافی نباشد:
سنسورها در عمل دارای نویز زیادی هستند
دقت آنها محدود است
خراب میشوند ( قابل اعتماد نیستند)
قسمت محدودی از محیط را تحت پوشش قرار میدهند
قادر به توصیف دقیق محیط نیستند
سنسور مورد علاقه ممکن است گران باشد لذا ممکن است با ترکیب چند سنسور ارزان به هدف مورد نظر رسید
اسلاید 5 :
تکنیک های ترکیب اطاعات سنسور ها
داده ها از چندین منبع مختلف جمع آوری میشوند
از طریق چند سنسور مختلف اندازه گیری میشوند
از چند موقعیت مختلف اندازه گیری میشوند
در زمانهای مختلف اندازه گیری میشوند
با استفاده از یک روش ریاضی عدم قطعیت موجود در منابع داده درنظر گرفته میشود.
روشهای بیزین
شبکه های عصبی
فیلتر کالمن
اسلاید 6 :
دسته بندی سنسورها
داخلی:
اطلاعاتی را از داخل روبات اندازه گیری میکنند. مثل: سرعت موتور، زاویه مفصل ها، ولتاژ باتری وغیره
خارجی:
اطلاعاتی را از محیط روبات جمع آوری میکنند: اندازه گیری مسافت، شدت نور، دامنه صدا
Passive:
سنسور انرژی را از محیط دریافت میکند مثل سنسور حرارتی، CCD ، و میکروفن
Active:
انرژی را به محیط فرستاده وعکس العمل محیط در مقابل آنرا اندازه گیری میکند.
اسلاید 7 :
اندازه گیری کارائی سنسورها
Dynamic Range
عبارت است از دامنه حد بالا و پائین مقادیر ورودی به سنسور به نحویکه سنسور قادر به عملکرد عادی خود باشد.
DR= Maximum Input/Minimum Input
معمولا بر حسب دسیبل بیان میشود.
اسلاید 8 :
Range :حد بالای مقادیر ورودی به سنسور
Reso ution:
حداقل اختلاف بین دو مقداری که توسط سنسور قابل دریافت است
inearity
نحوه رفتار خروجی یک سنسور نسبت به تغییرات سیگنال ورودی را مشخص میکند
یک رفتار خطی با رابطه زیر مشخص میشود.
F(ax+by)= aF(x)+ bF(y)
اسلاید 9 :
Bandwidth or Frequency
برای اندازه گیری سرعت یک سنسور در آماده کردن دنباله ای از خروجی ها بکار میرود. بعبارت دیگر تعداد اندازه گیری های سنسور در ثانیه را به فرکانس تعبیر میکنند.
Sensitivity
عبارت است از معیاری از میزان تغییرات جزئی در سیگنال ورودی که میتواند باعث تغییر در خروجی شود:
Output change / Input change
اسلاید 10 :
Cross Sensitivity
عبارت است از حساسیت به پارامترهای محیطی که متعامد با سیگنال اصلی هستند.
یک قطب نما میتواند در جهت یابی روبات بر اساس میدان مغناطیسی زمین بسیار مفید باشد. اما این وسیله علاوه بر میدان مغناطیسی زمین به مصالح ساختمانی فلزی نیز حساسیت دارد. در نتیجه استفاده از آن برای روبات که در محیط اتاق حرکت میکند چندان مفید نخواهد بود.
