






بخشی از پاورپوینت
اسلاید 1 :
1- خرپا Truss
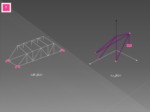
خرپا سازه ای است که برای تحمل بارها و جلوگيری از حرکت طراحی می شود. اجزا يااعضای خرپا از قطعات لاغر ( باريک )، مستقيم تشکيل شده اند که در انتهای خود به يکديگر متصل می شوند و گره ها را به وجود می آورند . در صورتی که اين گره ها به صورت اتصالات فاقد اصطکاک ، در نظد گرفته شوند. و اگر وزن ععضو ، ناچيز ( قابل اغماض ) در مقايسه با نيروهايی که در گره ها منتقل می شوند ، عضو را می توان دو نيرويی( two-force member ) در نظر گرفت. اين بدان معنی است که تنها نيروهای مؤثر به عضو، نيروهای وارد بر گره های اتصال می باشد و اين نيروها در راستای محور اعضاء منتقل ميشوند . اعضای مستقيم يا تحت اثر کشش يا فشار بوده و تحت اثر خمش يا پيجش نمی باشند.
در نتيجه ،اين امر امکان طرح سازه های خيلی سبک متشکل از اعضای لاغر ، طويل (دراز) بوجود می آيد. در صورتی که عضو توسط نيروهای گره کشيده شوند ، عضو تحت کشش خواهد بود و اگر نيروهای گره به عضوفشار آورد، عضو تحت فشار می باشد. يک عضو تحت کشش از طرف لولای pin) ( واقع در گره ، کشيده می شود ( تمايل به دور شدن از گره را دارد ) و يک عضو تحت فشار ، به سمت لولا فشار می آورد( تمايل به نزديک شدن به گره را دارد ). خرپاها ممکن است صفحه ای (مسطح) باشند يعنی تمامی اعضای خرپا در يک صفحه قرار داشته باشند يا اين که ممکن است خرپا فضايی باشد يعنی اعضای خرپا در يک صفحه تکی قرار نداشته باشند و قادر به تحمل بارها درهر جهتی باشد . يک خرپای صفحه ای (plane truss ) در شکل الف و يک خرپای فضايی ( space truss ) در شکل ب ، نشان داده شده است.
اسلاید 2 :
2- قاب Frame
يک قاب برای تحمل بارها و ممانعت از حرکت طراحی می شود ولی برخلاف يک خرپا، قاب حداقل دارای يک عضو است که بطش از دو نيرو بر آن اثر کند. اين بدان معنی است که بعضی قسمت ها (اجزای) قاب را نمی توان به صورت اعضای کششی يا فشاری ساده مدل نمود، بلکه طراح بايد اثرات خمشی وپيچشی را منظور دارد. اين اعضای چند نيرويی ( ) ممکن است به علت اتصال يک جزء به اجزای ديگر در نقاطی غير از نقاط انتهايی يا به علت وزن يک عضو که به مرکز ثقل آن اثر می کند و به اندازه کافی برای در نظر گرفتن، بزرگ است، به وجود آيد.
يک قاب ساده در شکل زير نشان داده شده است.
اسلاید 3 :
فرهنگ لغات webster ، ماشين machine را بصورت “ مجموعه ای از اعضا که نيروها، حرکت و انرژی از يکی به ديگری به طرزی که از پيش تعيين شده است، انتقال می دهد “ تعريف می کند. بنا به تعريف ماشين ها ، دارای اجزاء متحرک بوده و حداقل دارای يک عضو چند نيرويی می باشند.
بنا براين دو قطعه انبردست به صورت يک ماشين طبقه بندی می گردند و با آنکه اهرم های ساده نيروها و حرکت را انتقال می دهند ولی در زمره ماشين ها قرار نمی گيرند چون به صورت اعضای تکی می باشند.
ماشين برای انتقال يا تبديل نيروها طراحی می شود و دارای قطعات متحرک بوده و ممکن است ثابت نباشد.
اسلاید 4 :
يک حالت خاص تعادل، زمانی پيش می آيد که فقط نيروها در دو نقطه واقع بر يک جسم صلب اثر کند . در اغلب اوقات از وزن جسم جشم پوشی می شود و به جسم صلب، جسم دو نيرويی two-force body گفته می شود و اگر در حال تعادل باشد، دو نيرو به لحاظ مقدار برابر و هم امتداد و مختلف الجهت باشند.
مطابق شکل زير، گر چه در نقاط A و B ممکن است بيش از يک نيرو اثر کند( مثلا، مؤلفه ها) با يد آنها را جمع زد تا يک نيروی معادل تکی در هر نقطه به دست آيد و اين نيروهای معادل بايد شرط عضو دو نيرويی را بر آورده نمايد.
اگر سه معادله عددی تعادل برای عضو دو نيرويی نوشته شود، نتيجه آن، نشان می دهد که نيروها مساوی ، مختلف الجهت و هم امتداد می باشند . بنابراين با آنکه برای تحليل لازم نمی باشد، رابطه نيرويی برای يک عضو دو نيرويی را می توان برای کاهش تعداد مجهولات مورد استفاده قرار داد. اين امر به ويژه در تحليل سازه ها صادق خواهد بود. در بسياری از کاربردها، عضو دو نيرويی عضوی مستقيم و لاغر و خط اثردو نيرومنطبق با محور عضو ، مطابق شکل ( 2 ) می باشد. عضو مستقيم نشان داده شده در شکل 2- الف، تحت فشار و عضو مستقيم نشان داده شده در شکل 2- ب، تحت کشش می باشد.
خرپاها به صورت مجموعه ای از اعضای دو نيرويی که تحت فشار يا کشش می باشند، مدل می گردند.
اسلاید 5 :
اگر جسمی فقط تحت اثر سه نيرو قرار گيرد، به آن جسم سه نيرويی three-force body می گويند . اگراين جسم سه نيرويی در حال تعادل باشد، سه نيرو بايد صفحه ای و يا به صورت متقارب يا موازی باشند. به سادگی مشهود است که نيروهای وارد به يک عضو سه نيرويی بايد صفحه ای باشند. چون هر دو نيرو از اين سه نيرو معرف صفحه ای در فضا می باشند و نيروی سوم بايد در اين صفحه قرار گيرد و اگر قرار نگيرد، مؤلفه ای عمود بر اين صفحه خواهد داشت و در آن صورت جسم در حال تعادل نخواهد بود .
مثال هايی از اين دو مورد در شکل (1 ) نشان داده شده اند.
چون نيروهای وارد بر يک عضو سه نيرويی، صفحه ای می باشند چنين عضوی را هميشه می توان به صورت يک جسم دو بعدی تلقی نمود ( در نظر گرفت) . از اين مشاهدات مربوط به اعضای سه نيرويی می توان برای کاهش کار حل معادلات و همچنين اساس بعضی از راه حل های ترسيمی يا مثلثاتی استفاده نمود. همانند اعضای دو نيرويی، اعضای سه نيرويی را می توان به صورت هر جسم صلب ديگری که در حال تعادل است مورد آناليز قرار داد.
يکی از و يقينا يکی از ساده ترين مثالها در مورد عضو سه نيرويی يک اهرم می باشد که در شکل (2) صفحه بعد نشان داده شده است
اسلاید 6 :
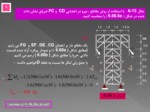
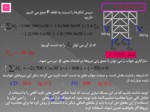
يک مقطع مار بر اعضای BC ،BG،HF و GH(مقطعb-b ) مطابق شکل الف عبور می دهيم تا چهار نيروی داخلی مجهول را آشکار سازد که دو تا از آنها نيروهای خواسته شده می باشند . معادلات تعادل را نمی توانيم به طور کامل حل کنيم مگر آنکه يک يا تعداد بيشتری از اين نيروها ، از طريق ديگری معلوم شوند . بدين منظور ترکيبی از روش مقطع و روش گره را به کار می بريم تا نيروهای خواسته شده را محاسبه نماييم.
ابتدا يک مقطع را از وسط خرپا در مجاورت اعضايی که نيروهای آنها را می خواهيم حساب کنيم، عبور می دهيم . مقطعa-a در شکل الف، اعضای HF,CG.CD, را قطع می کند . پيکره آزاد شده قسمت سمت راست خرپا را مطابق شکل ( ب) رسم می کنيم . اکنون با جمع زنی لنگرها نسبت به نقطه H خواهيم داشت:
