









بخشی از پاورپوینت
--- پاورپوینت شامل تصاویر میباشد ----
اسلاید 1 :
” آشنايی با سيستم های کنترل زمان - گسسته“
در سالهای اخير، بسياری از سيستم های صنعتی، کامپيوتر های ديجيتال را به عنوان جزء لازم عمليات خود دربر می گيرند. سير تکاملی اخير ميکروپروسسورها و ميکروکامپيوترها که می توانند در وظايف کنترلی مختلف مورد استفاده قرار گيرند، روند جديدی در جهت منظور کردن کامپيوترهای ديجيتال حتی در سيستم های کنترل با مقياس کوچک به منظور به دست آوردن عملکرد بهينه برقرار کرده است.
اسلاید 2 :
در مهندسی کنترل، کامپيوترهای ديجيتال برای دو منظور مختلف بکار برده می شوند:
1- تحليل و ترکيب سيستم های کنترل پيچيده شامل شبيه سازی ديجيتالی و محاسبه ديجيتالی ديناميک های کنترل پيچيده
2- به صورت کنترل کننده در سيستم های کنترل
تاکيد ما در اين دوره درسی بر کنترل کننده های ديجيتال است نه بر شبيه سازی ديجيتالی يا محاسبه ديجيتالی ديناميک های کنترل پيچيده.
اسلاید 3 :
انواع روشهاي پياده سازي سيستمهاي كنترل
- People know more than machines, so
leave decisions to them
- Manual operation
- Mechanical Operation
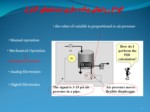
- Pneumatic Devices
- Analog Electronics
- Digital Electronics
اسلاید 4 :
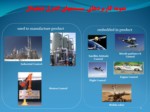
نمونه هایی از كاربردهای عملي
- صنایع پتروشیمی
- سیستمهای فضایی
- صنایع موشکی و رباتیک
اسلاید 5 :
انواع روشهاي پياده سازي سيستمهاي كنترل
- Why digital control?
- digital control versus analog control
- دقت:
- سيستمهاي ديجيتال از دقت بالاتري برخوردار مي باشند و در اثر نويز مختلف كمتر از سيگنالهاي آنالوگ دچار خطا مي شوند
- خطاهاي پياده سازي:
- پردازش ديجيتال سيگنالهاي كنترل: بر اساس مقادير ذخيره شده مي باشد كه نمايش ديجيتال آنها با خطاي كمي همراه است.
- پردازش سيگنال آنالوگ: از المانهائي مثل خازن و مقاومت استفاده مي كند كه مقادير آنها نسبت به مقادير نامي تغيير محسوسي مي كند.
اسلاید 6 :
- انعطافپذيري:
- كنترل كننده هاي آنالوگ: با پياده سازي سخت افزاري آنها، اصلاح يا تغيير طراحي مشكل خواهد بود
- كنترل كننده هاي آنالوگ: تنها پياده سازي كنترل كننده هاي ساده امكان پذير خواهد بود
- كنترل كننده هاي ديجيتال: اصلاح آنها بدون جايگزينی كامل كنترل كننده اصلي ميسرخواهد بود
- كنترل كننده هاي ديجيتال: پيچيده تر شدن كنترل كننده تنها منتج به اضافه شدن چند عمليات رياضي در كنترل كننده مي گردد
اسلاید 7 :
- سرعت و هزينه :
- سخت افزارهاي كامپيوتري سريع تر، پريودهاي نمونه برداري كوتاه تري را نتيجه مي دهند
- با پريودهاي نمونه برداري كوتاه، كنترل كننده هاي ديجيتال، متغيرهاي كنترلي را تقريبا بطور پيوسته مانيتور مي كنند
- پيشرفت در تكنولوژي VLSI منجر به مدارات مجتمع بهتر، سربع تر و مطمئن تر و با قيمت كمتر شده است.
اسلاید 8 :
مراحل طراحی سیستم کنترل دور موتور DC
1- مدلسازی موتور DC
2- طراحی کنترل کننده آنالوگ PI
3- تبدیل کنترل کننده آنالوگ به دیجیتال
4- تحقق کنترل کننده
اسلاید 9 :
مدلسازی موتور
اولین گام در طراحی یک سیستم کنترل ، مدلسازی سیستم تحت کنترل است.
روش های مدلسازی:
مدلسازی بر اساس قوانین و روابط فیزیکی حاکم بر سیستم
مدلسازی با استفاده از اطلاعات ورودی- خروجی سیستم
اسلاید 10 :
مدلسازی با استفاده اطلاعات ورودی خروجی
اعمال ورودی پله با ولتاژهای 2.5 ، 5 ، 7.5 ، 9.47 ولت
اندازه گیری سرعت موتور
