





بخشی از پاورپوینت
--- پاورپوینت شامل تصاویر میباشد ----
اسلاید 1 :
مقدمه
lقابلیتNavigation یکی از نیازمندیهای مهم روبات متحرک است.
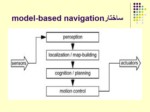
lبرای موفقیت در این امر میبایست تمام چهار جزء اصلی آن نیز بخوبی انجام شوند:
.1: Preceptionروبات میبایست تعبیر مناسبی از داده های سنسورها داشته باشد
.2: localizationروبات میبایست موقعیت خودش را در محیط پیدا نماید
.3: Cognition روبات میبایست در مورد نحوه رسیدن به هدف تصمیم گیری نماید.
.4: Motion Controlروبات میبایست خروجی موتورهایش را برای حرکت در مسیر مطلوب کنترل نماید.
اسلاید 2 :
مشکلاصلیبرسرراهمکانیابی
lمسئله مکان یابی بسی فراتر از مسئله پیدا کردن موقعیت یک روبات در محیط است .
lروبات ممکن است نیازمند دانستن فاصله نسبی اش تا اشیا و آدمی باشد.
lروبات ممکن است نیاز به داشتن نقشه ای از محیط باشد تا برای انجام کارهایش قادر به planning باشد.
lمسئله مکان یابی بشدت وابسته به استفاده از سنسورهای روبات است. اما به خاطر اینکه این سنسورها دارای عدم قطعیت هستند مسئله مکان یابی دقیق روبات به مسئله ای پیچیده تبدیل میشود.
اسلاید 3 :
دوروشممکندرروباتیک
lنقشه شکل زیر را در نظر بگیرید. روبات برای انجام Navigation نیاز دارد که از سنسورها برای جلوگیری از برخورد با اشیا استفاده نماید. همچنین روبات باید بتواند موتورهایش را کنترل نماید.
lآیا روبات برای رفتن از اتاقی به اتاق دیگر نیاز به مکان یابی دارد؟
اسلاید 4 :
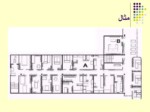
استفادهازنقشه
lممکن است مکان یابی برای جابجائی بین دو اتاق ضروری باشد. روبات باید بتواند موقعیت خود را در روی نقشه پیدا کند تا از رسیدن به هدف مطمئن گردد.
lهمچنین روبات باید بتواند هدف را در روی نقشه مشخص نماید.
اسلاید 5 :
پرهیزازایجادنقشه
lمکتب Behaviour-based از طرف دیگر معتقد است که بعلت وجود نویز در سنسورها باید از ایجاد نقشه ژئومتریک پرهیز نمود.
lدر این روش از ارائه موقعیت آشکار و همچنین طرح ریزی مسیر پرهیز میشود.
lدر این روش اعتقاد بر این است که میتوان فرایندی برای انجام یک navigation مشخص انجام داد. برای مثال برای رفتن از اتاق A به اتاقB میتوان از یک رفتار برای دنبال کردن دیوار و از رفتار دیگری برای تشخیص اتاق مقصد که با فرش قرمز مفروش شده است استفاده نمود.
اسلاید 6 :
ساختار Behavior based navigation
lاز مزایای این روش سادگی پیاده سازی برای یک مسئله با اهداف محدود است.
lاز معایب آن این است که بسادگی برای سایر مسایل و یا محیط های بزرگترقابل تعمیم نیست.
lهمچنین طراحی رفتارهائی مانند تعقیب یک دیوار بسادگی قابل پیاده سازی نبوده و به سخت افزار روبات بستگی خواهد داشت.
lدر عمل ممکن است رفتارهای متعددی بطور همزمان فعال باشند که انتقال بین آنها به تنظیمات دقیقی نیاز دارد که وقتی رفتار جدیدی به سیستم اضافه میشود همه این تنظیمات به هم میخورد.
اسلاید 7 :
در این روش
روبات با استفاده از سنسورها اطلاعاتی در مورد محیط جمع میکند.
lسپس باوری در مورد موقعیت روبات در روی نقشه بوجود میآید.
در این روش همکاری بین انسان و روبات ساده تر انجام میشود که نقشه این محیط را میسازد.
این خطر وجود دارد که تصور روبات از محیط و واقعیت تفاوت زیادی داشته باشند.
امید می رود که در آینده بتوان روباتهائی ساخت که قادر به تهیه نقشه و حرکت در محیط های مختلفی باشند.
اسلاید 8 :
نمایشنقشه
lروبات باید نقشه ای برای نمایش و یا مدل کردن محیط ایجاد نماید. در اینصورت:
lنقشه باید چه جنبه هائی از محیط را شامل شود؟
lوبالعکس نقشه در چه سطحی قادر به نمایش محیط است؟
lهمچنین روبات باید باوری نسبت به موقعیت خود در روی نقشه داشته باشد.) ممکن است روبات موقعیت خودش را با یک و یا چندین نقطه در روی نقشه مشخص نماید(
اسلاید 9 :
باورتکفرضیهای
lمستقیم ترین روش نشان دادن موقعیت روبات در یک نقطه باور تک فرضیه ای است که در آن فقط یک موقعیت برای روبات متصور میشود.
lحسن این روش عدم وجود ابهام درموقعیت است که باعث میشود تا تصمیم گیری در مواردی نظیر طراحی مسیر بسادگی قابل انجام باشد.
lبه همین ترتیب به روز کردن باور روبات به موقعیتش نیز میتواند بسادگی انجام پذیرد. اما وجود خطا در سنسورها این امر را با چالش زیادی روبرو میسازد.
اسلاید 10 :
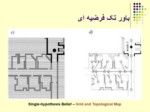
باورچندفرضیهای
در این روش روبات بطور همزمان چندین رد از موقعیت را دنبال میکند.
ممکن است نظم وترتیبی به موقعیت ها داده شود بنحویکه موقعیتی محتملتر از سایرین باشد.
برای مثال ممکن است موقعیت روبات در صفحه دو بعدی بصورت یک توزیع احتمال گوسی با مقدار میانگین و واریانس نشان داده شود.
در این روش روبات بطور مشخص عدم قطعیت در موقعیت خودش را نگهداری خواهد نمود.
از معایب این روش مشکل بودن تصمیم گیری است.
از جنبه محاسباتی تصمیم گیری ها پر هزینه هستند.
