











بخشی از پاورپوینت
--- پاورپوینت شامل تصاویر میباشد ----
اسلاید 1 :
"مکانيابي منبع نوري به کمک ميکروکنترلر ATmega16"
- راه اندازي موتور Servo
- به کارگيري باطري خورشيدي
- ساخت اجزا سخت افزاري لازم از قبيل پورت Programmer ميکروکنترلر
- برنامه نويسي در محيط CodeVision جهت برنامه ريزي ميکروکنترلر
- طراحي شماتيک و PCB مدار
- ساخت قسمت هاي مکانيکي مدار از قبيل جعبه محتوي باطري خورشيدي
اسلاید 2 :
"مکانيابي منبع نوري به کمک ميکروکنترلر ATmega16"
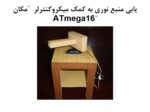
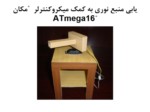
- يک منبع نوري (در اين پروژه از لامپ 200 وات استفاده شده است) در يک فاصله مشخص از يک سنسور نوري و يا باطري خورشيدي قرار مي گيرد. بر اساس اين فاصله، مقدار ولتاژ ايجاد شده توسط اين باطري اندازه گيري مي شود.
- اين ولتاژ بستگي به زاويه ي قرارگيري پرتو نوري ساطع شده از منبع و خط عمود بر صفحه ي سنسور دارد. هرچه اين زاويه به صفر نزديکتر باشد، شدت نور دريافت شده بيشتر و در نتيجه آن ولتاژ توليد شده توسط باطري بيشتر خواهد بود.
- هدف در اين پروژه مکان يابي منبع نوري است به طوري که بيشترين مقدار ولتاژ توسط باطري توليد شود.
اسلاید 3 :
- به منظور حرکت دادن سنسور و چرخش آن در يک بازه معين، از يک موتور Servo استفاده شده است.
- بازه ي چرخش موتور مورد استفاده در اين پروژه تا 160 درجه قابل اطمينان مي باشد و همين بازه به عنوان بازهي عملياتي مورد استفاده قرار گرفته است.
- در اين صورت مکان منبع نوري بايد در فاصله ي اين زوايا نسبت به موتور و باطري خورشيدي قرار بگيرد و موتور نيز مي بايست با حرکت در اين بازه و تغيير مکان باطري، بر اساس فرمان هاي رسيده از طرف ميکرو، منبع نور را محل يابي کند.
اسلاید 4 :
- ميکرو پس از توقف موتور در هر مقطع، با فاصله 20 ميلي ثانيه و به تعداد سه بار از ولتاژ خوانده شده توسط باطري نمونه برداري مي کند و سيگنال آنالوگ را به ديجيتال تبديل مي کند. مقدار ديجيتال در نظر گرفته شده توسط باطري در هر مقطع، ميانگين اين سه مقدار خوانده شده است.
اسلاید 5 :
- با شروع کار و ريست شدن سيستم، موتور، باطري را به نقطه ي اوليه يعني صفر درجه منطقي منتقل مي کند. سپس بدون توجه به محل قرارگيري منبع نوري، يک بار بهطور کامل، 160 درجه را جاروب کرده و مقادير شدت نور را که توسط باطري توليد شده و به مبدل آنالوگ به ديجيتال ميکرو منتقل شده است را در هر مورد با مقدار ماکسيمم بدست آمده تا آن مرحله مقايسه ميکند. در انتهاي اين مسير مقدار بدست آمده، بيشترين مقداري است که باطري در طي اين مسير توليد کرده است و اين مقدار به عنوان مقدار مرجع مورد استفاده قرار ميگيرد. علاوه بر اين محلي هم که باطري اين مقدار بيشينه را توليد کرده است نيز ذخيره ميشود.
اسلاید 6 :
ترازوي ديجيتال
- هدف از اين پروژه طراحي يک ترازوي ديجيتالي، با قابليت اندازه گيري وزن تا حداکثر 1 kg مي باشد. اين سيستم توسط يک حسگر وزن(load cell)، وزن جسم مربوطه را اندازه گيري کرده و روي صفحه نمايش نشان مي دهد.
- در اين پروژه کاربر با استفاده از يک سنسور فشار، وزن اجسام را حس کرده و متناسب با فشار جسم ولتاژي را در خروجي توليد مي کند، اين ولتاژ آنالوگ توسط يک تقويت کننده تقويت شده و از طريق مبدل آنالوگ به ديجيتال پورت A ميکرو به حالت ديجيتال در آمده و توسط صفحه نمايش نشان داده مي شود.
اسلاید 7 :
قبله نماي الکتريکي
- در اين پروژه بر اساس ورودي يک سنسور به ATMEGA16 ، جهت قطب را به کمک نرم افزار بدست مي آوريم. در استفاده از اين سنسور calibration بسيار مهم است.
- بعد از بدست آوردن جهت شمال و جنوب، راستاي قبله را به دست مي آوريم.
اسلاید 8 :
مدار فاصله سنج التراسونيک(سونار)
- کاربرد خاص مدار مورد بحث يافتن فاصله ي اين شي با اشيا روبروي خود بوسيله سنسورهاي اولتراسونيک ميباشد. از اين مدارها در حال حاضر در صنعت خودروسازي (با نام صنعتي سونار) و همچنين در روبوتيک جهت تشخيص فاصله روبوت ها با موانع روبرو استفاده مي شود
اسلاید 9 :
طراحي و ساخت يک ربات کنترل از راه دور بوسيله برد های قابل برنامه ريزی SARDتحت استانداردZigBee
اسلاید 10 :
طراحي و ساخت يک ربات کنترل از راه دور بوسيله برد های قابل برنامه ريزی SARDتحت استانداردZigBee
در متن اصلی پاورپوینت به هم ریختگی وجود ندارد. برای مطالعه بیشتر پاورپوینت آن را خریداری کنید
