















بخشی از پاورپوینت
اسلاید 1 :
موتور پله ای چیست و مشخصه های اساسی آن کدامند؟
- موتور پله ای یک موتور الکتریکی هست که ورودی الکتریکی دیجیتال را به یک حرکت مکانیکی تبدیل می کند.
- شکل زیر مقطع عرضی سا ختار یک موتور پله ای مدرن نمونه را نشان می دهد:
اسلاید 2 :
- پله بر ثانیه :
SPS = (RPM * SPR) /60
- تعداد پله ها
- سرعت موتور
- گشتاور
اسلاید 3 :
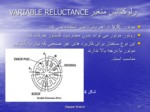
- این موتور به نام موتور “رلوکتانس متغیر تک پشته ای” خوانده می شود.
- هسته استاتور در شکل 2 دارای 6 قطب یا دندانه 60 درجه می باشد.
- روتور هم دارای 4 قطب 90 درجه می باشد.
- هر دو هسته روتور و استاتور ار جنس فولاد نرم هستند.
- سه دسته سیم پیچی همان طور که در شکل نشان داده شده است،
آرایش داده شده اند.
- هر دسته دارای دو کلاف است که به صورت سری متصل شده اند.
- به هر یک از این دسته سیم پیچ ها فاز می گویند.در نتیجه این ماشین یک موتور سه فاز است.
- جریان از یک منبع تغذیه DCاز طریق کلید های IIII,II, تامین می شود.
اسلاید 4 :
- در وضعیت 1 سیم پیچی فاز I از طریق جریان کلید I تغذیه می شود. یا به اصطلاح فنی فاز I تحریک می شود.
- دو قطب برجسته استاتور که تحریک شده اند با دو دندانه از چهار دندانه روتور هم ردیف هستند.
- این حالت از نظر دینامیکی یک حالت تعادل است.
- هنگامیکه کلید II برای تحریک فازII علاوه بر فاز I بسته می شود، شار مغناطیسی در قطب های استاتور فاز II به حالت نشان
داده شده در وضعیت 2 به وجود می آید و گشتاوری در جهت عکس ساعتگرد به وجود می آید، از اینرو روتور سر انجام به وضعیت 3 خواهد رسید.
- روتور با یک زاویه ثابت می چرخد که زاویه پله خوانده می شود.
اسلاید 5 :
- سوییچ های الکترونیکی در درایو یک موتور پله ای به کار می رود و سیگنال های سوییچینگ توسط IC های دیجیتال یا ریز پردازنده ها تولید می شود.
اسلاید 6 :
مزایای موتور پله ای:
- کم هزینه بودن آن
- ساختار ساده آن
- قابلیت اعتماد بالای آن
- عدم نیاز به نگهداری
- عدم نیاز به فید بک برای کنترل موقعیت یا سرعت
- سازگاری با تجهیزات دیجیتال مدرن
اسلاید 7 :
معایب موتور پله ای:
- نیاز به زمان نسبتا زیاد برای راه اندازی
- کارایی نا مناسب در سرعت های پایین،مگر آنکه از درایو MicroStep استفاده شود.
- جریان مصرفی بالا
- تلفات حرارتی زیاد در سرعت های بالا و ایجاد تداخل در کارایی موتور
اسلاید 8 :
انواع موتور های پله ای
اساسا سه نوع موتور پله ای وجود دارد:
- رلوکتانس متغیر VARIABLE RELUCTANCE
- آهنر بای دایمی PERMANENT MAGNET
- هیبرید HYBRID
تفاوت آنها بر حسب آنست که در ساختارشان از “آهنربای دایمی” یا “روتور آهنی با استاتور فولاد نرم لایه لایه” استفاده کرده باشند.
اسلاید 9 :
رلوکتانس متغیر VARIABLE RELUCTANCE
- موتور V.R. از آهنربای دایمی استفاده نمی کند.
- روتور موتور می تواند بدون محدودیت گشتاور حرکت کند.
- این نوع ساختار برای کاربرد های غیر صنعتی که نیاز به گشتاور موتور با درجه بالا ندارند
مناسب است.
اسلاید 10 :
- موتور نشان داده شده دارای چهار مجموعه استاتور پل (A,B,C) با زاویه 30 درجه می باشد.
- جریان وارد شده به پل A از طریق رشته موتور، یک جاذبه مغناطیسی ایجاد می کند که دندانه های روتور را با پل A همردیف می کند.
- نیروی استاتور پل B باعث می شود تا روتور به اندازه 30 درجه چرخش کند و همردیف با پل B شود.
- این رویه ادامه خواهد داشت تا پل C هم همردیف شود و دوباره در جهت عقربه های ساعت به پل A برگردد.
- این رویه را می توان به صورت معکوس و در جهت پاد ساعتگرد هم انجام داد.
در متن اصلی پاورپوینت به هم ریختگی وجود ندارد. برای مطالعه بیشتر پاورپوینت آن را خریداری کنید
