
















بخشی از پاورپوینت
اسلاید 1 :
مقدمه
در بحثهاي گذشته ، مباحثRegulator ها را در حاليکه سيگنال وروديهاي نرمال وجود نداشتند ، مورد بررسي قرار داديم. در اين راستا ، هدف از طراحي کنترل کننده آن بود که خطا را به صفر برسانيم . يعني در واقع بطور کلي گفتيم که براي سيستمي که به طور کامل کنترل پذير است ، فيدبك حالت، قطبهاي سيستم را درهر محل دلخواه قرار خواهد داد.
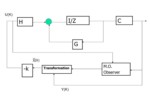
وقتي که در واقع حالت سيستم براي فيدبك در دسترس نباشد ، آنگاه از مشاهده کننده هاي طراحي شده جهت استفاده در فيدبك سود خواهيم برد .
براي يک سيستم که بطور کامل کنترل پذير و مشاهده پذير است ، سيستم فيدبك داراي مقادير ويژه مشاهده کننده و مقادير ويژه اي که بايد توسط فيدبك جايگزين شود ، خواهد بود .
اسلاید 2 :
سرو مکانيسم :
يک سيستم کنترل پسخوري است که خروجي آن وضعيت ، سرعت يا شتاب مکانيکي ميباشند . يعني در واقع اصطلاحات سرو مکانيسم و سيستم کنترل وضعيت باهم مترادفند .همين استفاده از سرو مکانيسم ها در بسياري از کاربردهاي صنعتي مانند عمل کاملا خود کار ماشينهاي ابزار که با دستور العمل برنامه ريزي شده اي کاري را انجام ميدهند مي باشد .
این پاورپوینت شامل جداول ،نمودار می باشد و قابل نمایش در سایت نیست
