












بخشی از پاورپوینت
--- پاورپوینت شامل تصاویر میباشد ----
اسلاید 1 :
مقدمه
يادآوري ميکنيم که بازوي يک روبات را ميتوان بصورت مجموعهاي از لينکها که توسط جوينتهاي دوراني يا خطي بهم متصل شدهاند، مدل کرد. هدف اين فصل بدست آوردن روشي براي نسبت دادن دستگاه مختصات مستقل به هر لينک است. پس از اين مرحله، معادلة كلي بازو General Arm Equation بدست ميآيد؛ که سينماتيک حرکت لينکها را بدست ميدهد. ابتدا به معرفي پارامترهاي مربوطه ميپردازيم.
اسلاید 2 :
پارامترهاي سينماتيک
دو لينک مجاور، بوسيله جوينت دوراني يا خطي بهم متصل شدهاند. موقعيت و جهت نسبي اين دو لينک، بوسيله دو پارامتر جوينت شناسايي ميشود.
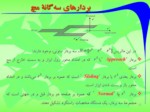
اسلاید 3 :
همانگونه که يک جوينت، دو لينک مجاور را به هم متصل ميکند، ميان دو جوينت متوالي نيز يک لينک قرار دارد. موقعيت و جهت نسبي محورهاي دو جوينت متوالي را ميتوان بوسيله دو پارامتر لينک بصورت شکل زير توصيف کرد:
اسلاید 4 :
نمايش D-H (Denavit-Hartenberg)
الگوريتم فوق، بنام الگوريتم D-H معروف ميباشد. توجه داشته باشيد که اين الگوريتم، در اصل از دو بخش تشکيل شده است. قسمت اول (مراحل 1 تا 7) دستگاههاي مختصات راستگردي را به انتهاي هر لينک نسبت ميدهد و قسمت دوم (مراحل 8 تا 13) مقادير پارامترهاي سينماتيک را محاسبه ميكند.
اسلاید 5 :
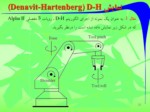
مثال 1: به عنوان يک نمونه از اجراي الگوريتم D-H ، روبات 5 مفصلي Alpha II که در شکل زير نمايش داده شده است را درنظر بگيريد.
اسلاید 6 :
معادله بازو (Arm Equation )
وقتي که براي هر لينک با استفاده از الگوريتم D-H ، يک دستگاه مختصات مستقل نسبت داده شود، ميتوان با بکارگيري يک ماتريس تبديل مختصات همگن، مختصات هرنقطه را از دستگاه k به دستگاه k-1 تبديل کرد. با ضرب کردن چند ماتريس تبديل مختصات همگن در يکديگر، يک ماتريس تبديل مختصات ترکيبي بدست ميآيد که مختصات ابزار را به مختصات پايه تصوير ميکند. اين ماتريس تبديل مختصات همگن را «ماتريس بازو» گويند.
اسلاید 7 :
براي ساختن ماتريس تبديل مختصات همگن که مختصات دستگاه k را به دستگاه k-1 تبديل کند، چهار مرحله وجود دارد. دستگاه مختصات k-1 را بايستي حول دستگاه مختصات k طوري دوران و انتقال داد تا دو دستگاه بر هم منطبق شوند. پياده سازي مراحل 8 تا 12 از الگوريتم D-H به چهار عمليات اساسي منتهي ميگردد که در جدول زير خلاصه شده است.
اسلاید 8 :
معادله بازو (Arm Equation )
بطور کلي T نشان دهنده ماتريس تبديل مختصات همگن است و انديس بالا نمايش دهندة دستگاه مبدأ و انديس پايين نشان دهندة دستگاه مقصد است. با استفاده از معادله بالا و تعريف تبديل Screw نتيجه زير ميرسيم.
اسلاید 9 :
نهايتاً ماتريس بازو از ضرب دو تبديل فوق حاصل خواهد شده كه بصورت زير ميباشد.
اسلاید 10 :
معادلات بازو براي چند روبات صنعتي
پارامترهاي حال براي محاسبة معادلة بازو، از آنجا كه در اين مثال فقط چهار محور وجود دارد، نيازي به تقسيم ماتريس بازو به دو بخش ابزار تا مچ و مچ تا پايه نيست و ميتوان مستقيماً ماتريس بازو را به صورت زير بدست آورد.
